Je cite:
J’ai construit une roue bidirectionnelle. Il s’agit d’une roue omnidirectionnelle, mais les petites roues qui la parcourent sont motorisées, ce qui lui permet également de se déplacer latéralement. Un robot équipé de cette roue pourra-t-il maintenir son équilibre ?
CAO et code : github.com/XRobots/BeltWheelR...
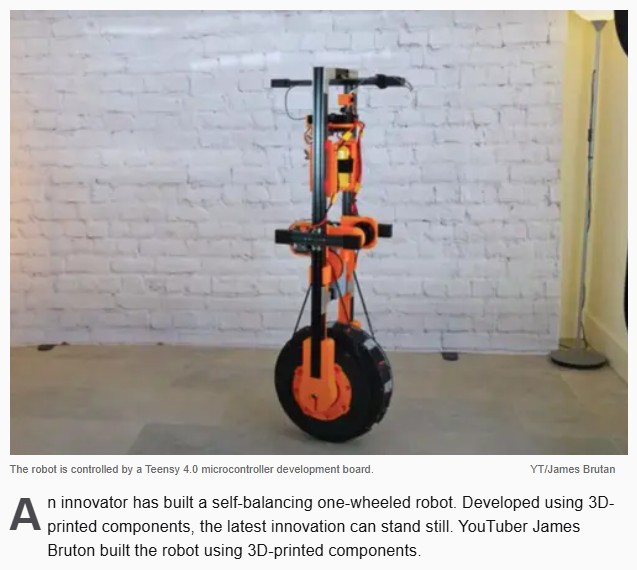
One-wheeled robot that can stand still developed using 3D-printed components
Source: interestingengineering.com
La vidéo: